某物料搬动机械手的结构如图所示,动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。 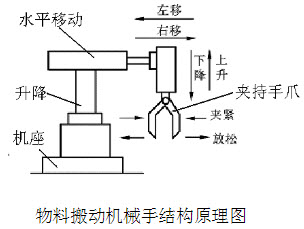
正确答案:
系统设计的详细工程路线:
(1)确定目标及技术规范:
机械手的用途:物料搬运。
工作方式:手动、自动方式。
主要技术参数:3自由度。
使用环境要求:生产线。
(2)可行性分析:收集资料、市场分析、可行性分析、技术经济性分析。
(3)总体方案设计:机械手总体结构方案设计,制定研制计划;开发经费概算;开发风险分析。
(4)总体方案的评审、评价
(5)理论分析阶段
机构运动学模型、作业空间分析;机构的力学计算;驱动元件的选择、动力计算;传感器选择、精度分析;建立控制模型、仿真分析。
(1)确定目标及技术规范:
机械手的用途:物料搬运。
工作方式:手动、自动方式。
主要技术参数:3自由度。
使用环境要求:生产线。
(2)可行性分析:收集资料、市场分析、可行性分析、技术经济性分析。
(3)总体方案设计:机械手总体结构方案设计,制定研制计划;开发经费概算;开发风险分析。
(4)总体方案的评审、评价
(5)理论分析阶段
机构运动学模型、作业空间分析;机构的力学计算;驱动元件的选择、动力计算;传感器选择、精度分析;建立控制模型、仿真分析。
答案解析:有

微信扫一扫手机做题